
 Shared autonomy
Shared autonomy
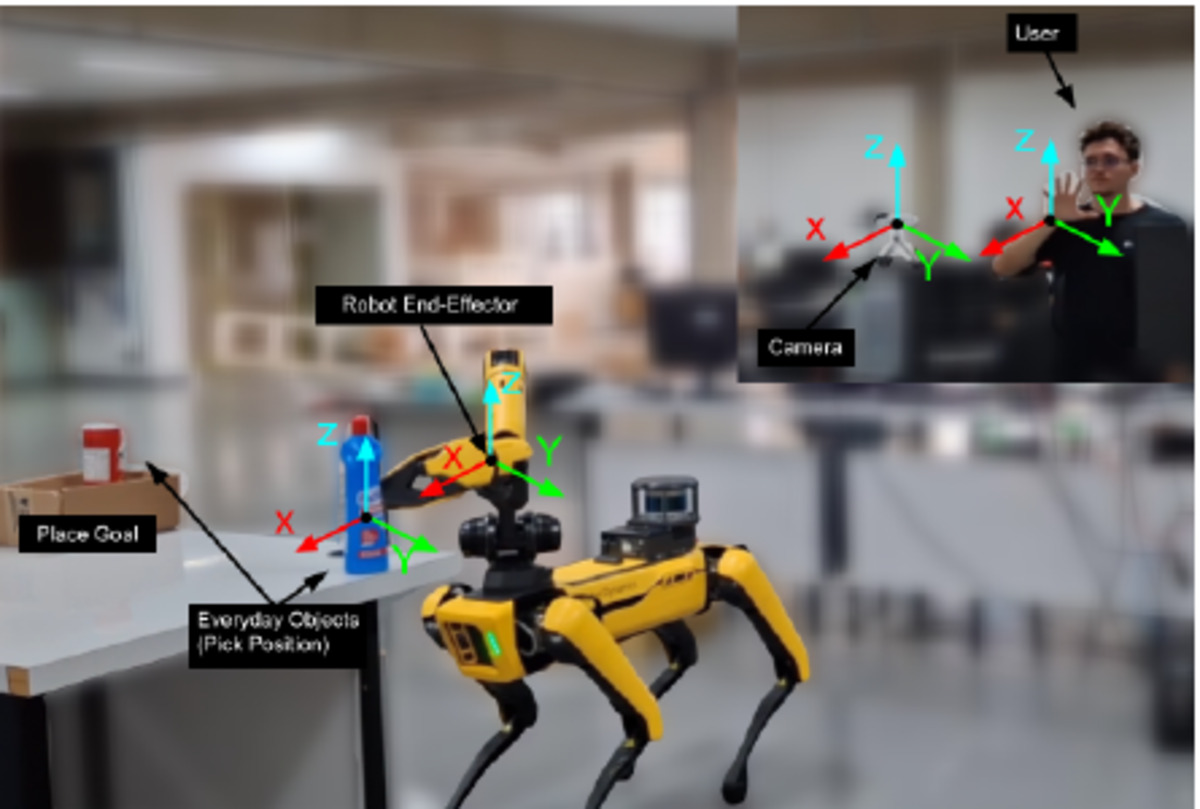
Open-vocabulary shared autonomy for robotic manipulation
The operator selects a target with a free-form prompt and controls Spot through arm motion and hand gestures. The robot tracks the target, avoids collisions, and assists the final approach.
All shared-control trials succeeded18 cm minimum obstacle clearance


![[IROS 2026] Towards Capability-Aware Traversability Navigation for Unstructured Environments](https://i.ytimg.com/vi/6MZS3EgpG2I/hqdefault.jpg)


